[Prof. Kyu-Jin Cho] Ladybird Beetle Inspired Compliant Origami
Author
mina7789
Date
2024-04-12
Views
575
Authors
Sang-Min Baek, Sojung Yim, Soo-Hwan Chae, Dae-Young Lee, Kyu-Jin Cho
Affiliations
Soft Robotics Research Center, Seoul National University, Seoul, Republic of Korea.
Department of Mechanical and Aerospace Engineering, Institute of Advanced Machines and Design, Seoul National University, Seoul, Republic of Korea.
School of Engineering and Applied Sciences and Wyss Institute for Biologically Inspired Engineering, Harvard University, Cambridge, USA. *Correspondence to: kjcho@snu.ac.kr.
Abstract
The ladybird beetle rapidly deploys its intricately folded wings and its wings effectively sustain the forces applied during flight. The core foundation of these features is the use of the geometry and deformation of a specialized vein in the wing that enables both its energy storage and self-locking mechanism. Energy storage and self-locking are also important functionalities in origami engineering. Origami offers major superiority in its compactness and lightweight properties. However, conventional origami design treats facets as non-deformable rigid plates; therefore, it is difficult to implement large energy storage and robust self-locking while maintaining the main advantages of origami design. In this manuscript, we propose a ladybird beetle inspired compliant origami that is capable of both large energy storage and self-locking in a single origami joint. The key principle of our advancement is the use of the deformation and geometry of the compliant facet; this has not been utilized in previous origami designs. Based on the proposed compliant origami, a deployable glider module for a multi-modal robot is developed. The glider module is compactly foldable, rapidly deployable, and can effectively sustain forces applied during flight. In addition, the proposed compliant origami is applied to a jumping mechanism, and the compliant origami components enlarged energy storage capacity of the jumping mechanism.
Summary
Ladybird beetle inspired compliant origami utilizes deformation and the geometry of its facet to enable novel energy storage and self-locking mechanism.
Sang-Min Baek, Sojung Yim, Soo-Hwan Chae, Dae-Young Lee, Kyu-Jin Cho
Affiliations
Soft Robotics Research Center, Seoul National University, Seoul, Republic of Korea.
Department of Mechanical and Aerospace Engineering, Institute of Advanced Machines and Design, Seoul National University, Seoul, Republic of Korea.
School of Engineering and Applied Sciences and Wyss Institute for Biologically Inspired Engineering, Harvard University, Cambridge, USA. *Correspondence to: kjcho@snu.ac.kr.
Abstract
The ladybird beetle rapidly deploys its intricately folded wings and its wings effectively sustain the forces applied during flight. The core foundation of these features is the use of the geometry and deformation of a specialized vein in the wing that enables both its energy storage and self-locking mechanism. Energy storage and self-locking are also important functionalities in origami engineering. Origami offers major superiority in its compactness and lightweight properties. However, conventional origami design treats facets as non-deformable rigid plates; therefore, it is difficult to implement large energy storage and robust self-locking while maintaining the main advantages of origami design. In this manuscript, we propose a ladybird beetle inspired compliant origami that is capable of both large energy storage and self-locking in a single origami joint. The key principle of our advancement is the use of the deformation and geometry of the compliant facet; this has not been utilized in previous origami designs. Based on the proposed compliant origami, a deployable glider module for a multi-modal robot is developed. The glider module is compactly foldable, rapidly deployable, and can effectively sustain forces applied during flight. In addition, the proposed compliant origami is applied to a jumping mechanism, and the compliant origami components enlarged energy storage capacity of the jumping mechanism.
Summary
Ladybird beetle inspired compliant origami utilizes deformation and the geometry of its facet to enable novel energy storage and self-locking mechanism.
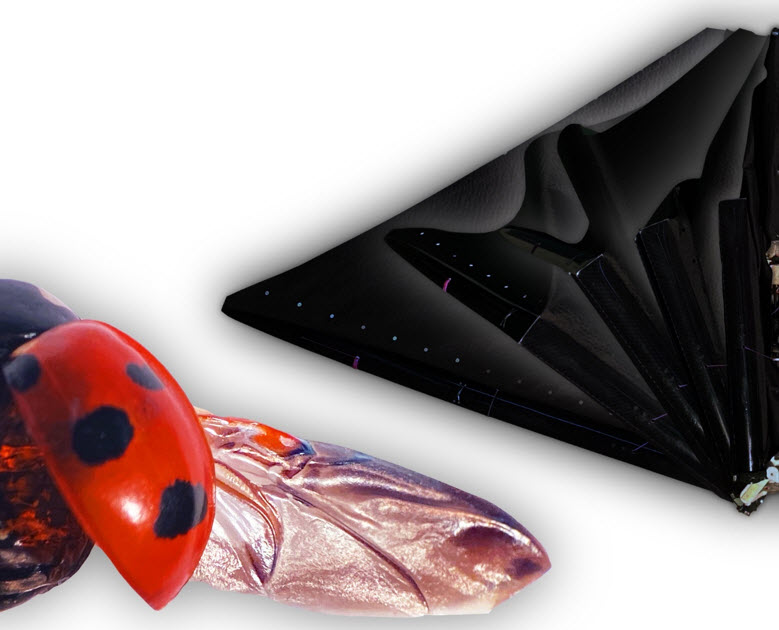
Ladybird beetle and developed wings that mimic them
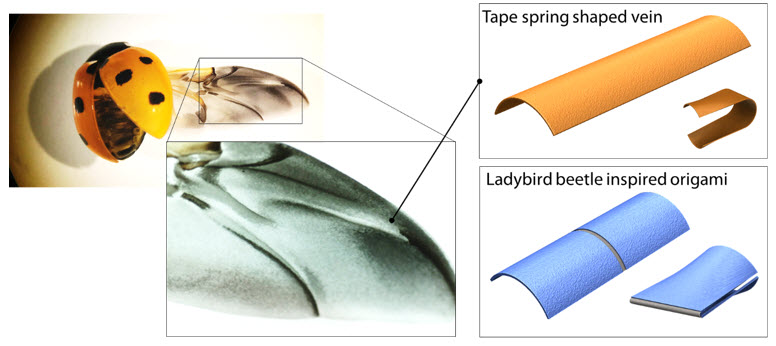
Origami-based structure mimicking the vein pattern of a ladybird beetle's wings.

The unfolded and folded appearance of the deployable wing. The wings can fold to 1/8 of their area.

Complex motion trajectory of a jumping-gliding robot utilizing deployable wings.
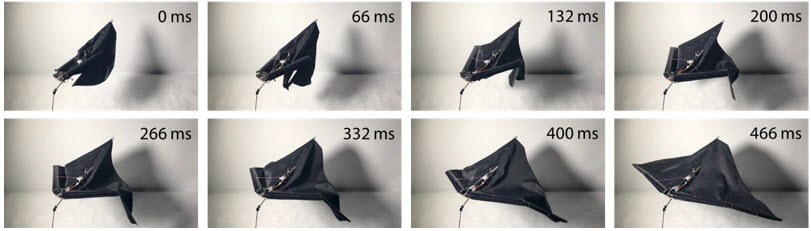
Unfolding sequence of the deployable wings