로봇 조작, 동작 최적화, 제어, 학습, 설계 등을 주로 연구하고 있다. 통합적으로 리 그룹과 미분기하학에서의 개념과 도구들을 사용하여 이와 같은 문제들에 접근하고 있다. 현재 진행되고 있는 연구에는 최적 경로 생성을 위한 실시간 알고리즘, 제약 조건하에서 표본 추출 기반의 동작 계획, 기계학습을 이용한 로봇 동작 학습 및 프로그래밍 등이 있다.
동역학 해석과 제어 기술을 로봇과 기전 시스템에 폭넓게 적용, 시스템 설계, 모델링, 시뮬레이션, 상태추정, 제어, 사용자 평가 등의 다양한 연구를 수행하고 있으며, 중점 연구분야로: 1) 공중작업/조작; 2) 햅틱/가상현실; 3) 자율비행/이동; 4) 원격제어; 5) 소프트/텐던로봇; 6) 산업제어응용 등의 연구를 수행하고 있다.
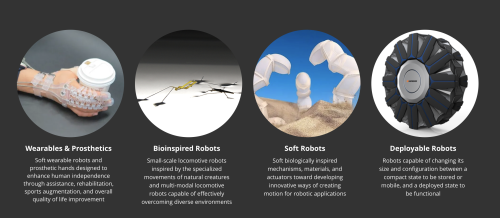
본 연구실은 부드러운 소재를 이용한 소프트 센서 및 액츄에이터, 그리고 이들이 융합된 다양한 형태의 소프트 로봇 개발을 연구 목표로 한다. 세부 연구분야로는 생명체들의 메커니즘과 움직임을 분석해서 소프트 로봇/메카트로닉 시스템을 구현하는 생체모방 설계, 다양한 재료가 융합된 3차원 소프트 구조를 제작하는 스마트 공정 개발, 구조적으로 정형화되지 않은 소프트 로봇을 효과적으로 제어할 수 있는 알고리즘 개발 및 적용 등이 있다.
컴퓨터비전과 기계학습 기술을 로봇이나 드론 등 자율주행 기기에 적용할 수 있도록 3D 모델링, 물체 인식 및 추적, 실시간 3D 센싱, 센서 퓨전 등의 다양한 연구를 수행하고 있으며, 중점적으로 Visual SLAM, Large-scale 3D modeling, Visual Tracking 등의 연구를 수행하고 있다
트랜스포머티브 아키텍쳐 연구실’ (Transformative Architecture Laboratory)에서는 역학, 제조, 로보틱스를 포함한 기계공학 지식뿐만 아니라 수학, 물리, 건축, 디자인 및 데이타 기반 설계 분야를 아우르는 다양한 융복합 기술을 이용하여 첨단구조물의 설계 및 제작에 관한 연구를 수행한다.
헬스케어 로보틱스 연구실은 의료분야에 적용가능한 다양한 액츄에이터, 센서, 메커니즘을 연구한다. 안전하고 정교하게 사용할수 있는 로봇수술 시스템, 원격로봇수술시 의사에게 촉감을 느끼게하여 수술의 정확성을 높이는 햅틱 기기, 몸안에 이식하여 장기를 보조, 치료, 또는 모니터링할수 있는 이식기기 등에 적용되는 연구를 진행한다.
본 연구실에서는 인위적인 미소 구조의 배열로 만들어진 인공 구조 (Metastructure) 를 통해 음의 밀도나 음의 강성 등의 독특한 고체역학 특성을 구현하고 이를 다양한 기계 분야에 응용하는 연구를 수행한다. 이를 위해 미소구조의 고체역학적 설계와 함께 다양한 멀티피직스 해석, 그리고 실제 실험적 검증 등의 연구로 관련 기술에 접근하고 있다.