
Prof. Yong-Lae Park’s Team Develops Artificial Muscle Embedded With Soft Sensors, Inspired by Organic Muscle
SNU Prof. Yong-Lae Park’s Team Develops Artificial Muscle Embedded With Soft Sensors, Inspired by Organic Muscle<?xml:namespace prefix = "o" ns = "urn:schemas-microsoft-com:office:office" />
- Refined control over artificial muscle produces smooth movements like those of humans and animals
- Research published on the cover of Soft Robotics, an international journal
▲ (From left to right) SNU Dept. of Mechanical and Aerospace Engineering Professor Yong-Lae Park; cover of Soft Robotics
Seoul National University’s College of Engineering (Dean: Kookheon Char) announced on July 20th that Dept. of Mechanical and Aerospace Engineering Professor Yong-Lae Park’s research team developed artificial muscle embedded with soft sensors, which operate similarly to proprioceptive sensors of an actual, organic muscle. This technology provides increased control over each motor unit of a robot’s muscle, allowing for soft robots to closely imitate the movements of humans or animals.
The soft sensors used in this research is very thin and easily stretchable. They can mimic how real muscles shift, while not adding to the size and the weight of the artificial muscle. Using these sensors, the artificial muscle can be made into a small, flat shape, minimizing its volume—which is helpful in creating soft robots comprised of multiple muscles in varying sizes, just like a human.
Two types of sensory receptors exist within an organic muscle. Muscle spindles detect the length of muscle contraction, while the Golgi tendon organs measure the stress generated by the contraction. Due to these receptors, humans and animals are able to move their body and use muscle power.
Until now, there had been a limit to the number of sensors that can be embedded in a robot, only allowing control over the general movement or force. It was not possible to exercise refined control over the actuator itself. To overcome these problems, Prof. Park’s team embedded soft sensors within the pneumatic artificial muscle, which were designed after muscle spindles and Golgi tendon organs of a biological muscle. The sensors were able to detect contraction displacement and force at the same time. Using real-time signal from the sensors, we can develop robots to mimic subtle human movements.
Conducted as a joint project with Carnegie Mellon University, the research was published on the cover of the August issue of Soft Robotics. The paper is titled “Sensorized, Flat, Pneumatic, Artificial Muscle Embedded with Biomimetic Microfluidic Sensors for Proprioceptive Feedback.”
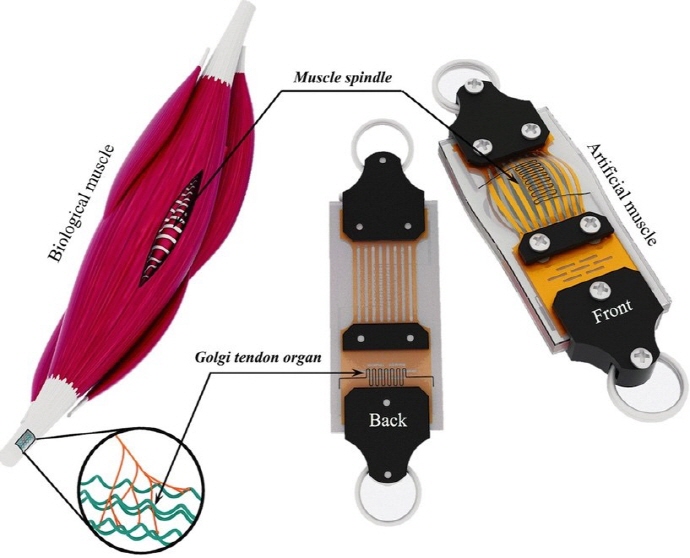
▲ Figure 1. Comparison of proprioceptors of organic and artificial muscle
[References]
Research paper: https://www.liebertpub.com/doi/10.1089/soro.2018.0110
J. Wirekoh, L. Valle, N. Pol, and Y.-L. Park, “Sensorized, Flat, Pneumatic Artificial Muscle Embedded with Biomimetic Microfluidic Sensors for Proprioceptive Feedback,” Soft Robotics, 2019.
Related articles:
- Maeil Business Newspaper: Research Team Develops Artificial Muscle With Soft Sensors, Inspired by Biological Muscle Receptors https://www.mk.co.kr/news/it/view/2019/08/644398/ - SNU Engineering News: https://eng.snu.ac.kr/node/17467
