Dynamic and Control
Research Area
Dynamic and Control
Robotics Laboratory
Prof. Park, Frank Chongwoo
The lab emphasizes physical interaction capabilities—such as grasping, manipulation, and motion planning—while developing machine learning and data science algorithms that allow robots to operate flexibly in complex environments. The lab’s research goal is to advance next-generation intelligent robots for applications in industrial automation, service robotics, and humanoid platforms.
Acoustics and Vibration Laboratory
Prof. Kang, Yeon June
The Acoustics and Vibration Lab focuses on analyzing the noise and vibration characteristics of various mechanical systems and developing technologies to reduce them.
To address real-world noise and vibration issues in industrial environments such as vehicles and motors, the lab conducts NVH (Noise, Vibration, Harshness) experiments and analysis-based research using high-performance equipment at the Advanced Automotive Research Center (AARC).
By integrating experimental and analytical techniques with advanced technologies such as artificial intelligence (AI), the lab aims to overcome the limitations of traditional approaches and deliver precise and efficient noise and vibration reduction solutions. Research areas are expanding to include acoustic materials, active noise control, and psychoacoustics, with the ultimate goal of developing practical and integrated noise/vibration control technologies.
Biorobotics Laboratory
Prof. Cho, Kyu-Jin
The Biorobotics Laboratory explores bio-inspired, flexible mechanisms and robotic systems that emulate the movements of living organisms without traditional joints or rigid linkages. The lab investigate novel modes of locomotion by leveraging soft materials, innovative actuators, and advanced fabrication techniques.
Their research leads to the development of various soft robotic platforms, including wearable assistive devices, bionic hands, and biomimetic mobile robots. A key focus is on engineering the structures and actuation mechanisms necessary to translate biological principles into engineering designs, with the ultimate goal of creating human-centered, adaptable robotic technologies.
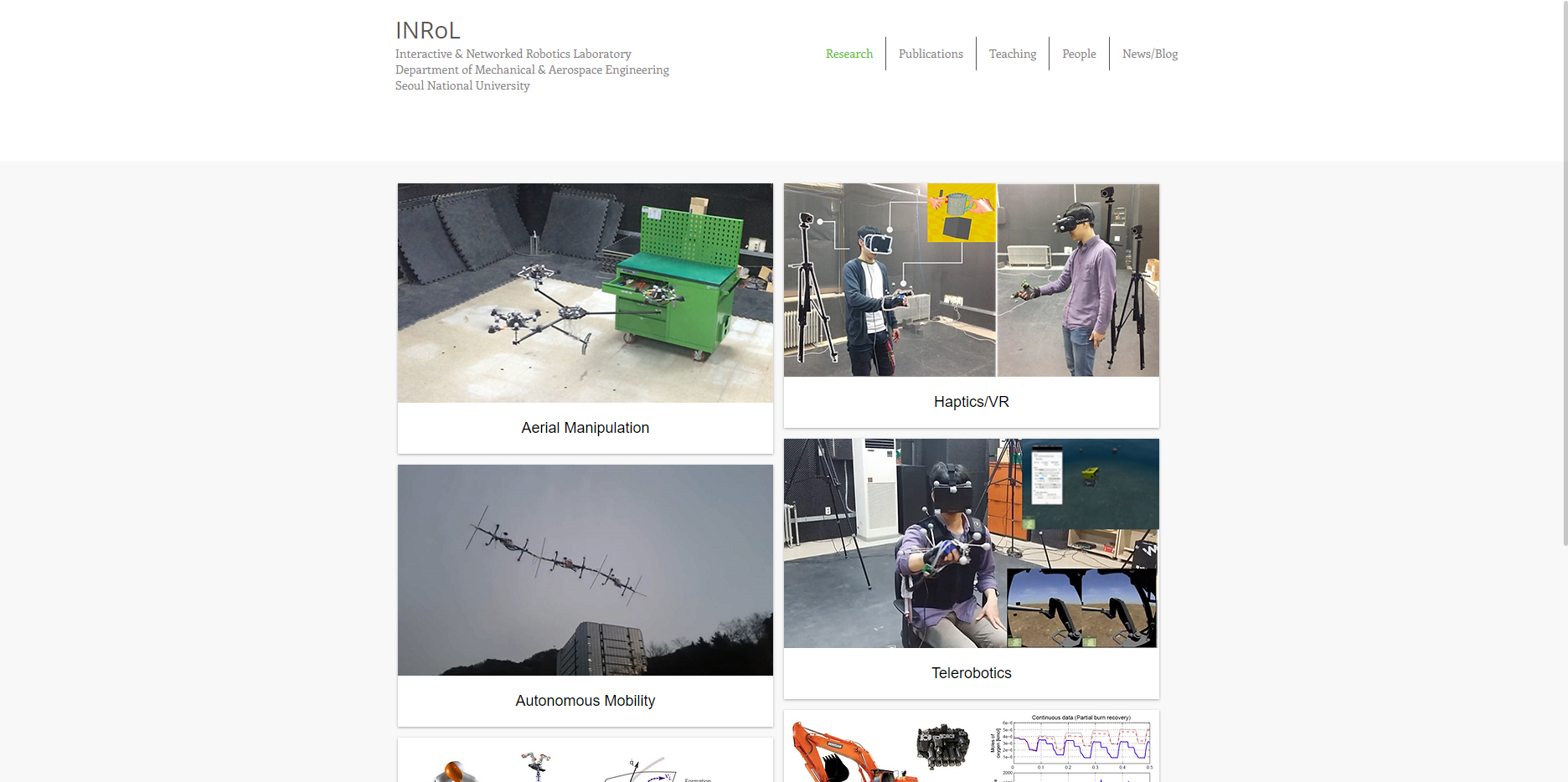
Interactive & Networked Robotics Laboratory (INRoL)
Prof. Lee, Dongjun
Robot Vision Laboratory
Prof. Lim, Jongwoo
The Robot Vision Laboratory develops advanced computer vision and machine learning techniques for autonomous robots, self-driving vehicles, and AR/VR applications. Their research focuses on both geometric and semantic understanding of environments, enabling intelligent systems to perceive and navigate complex real-world spaces.
Key areas include Visual SLAM, visual-inertial odometry, multi-view stereo depth estimation, and large-scale 3D reconstruction. The lab also study object tracking, semantic scene segmentation, and scene understanding for autonomous driving, aiming to improve the precision and robustness of spatial and semantic perception in dynamic environments.
Soft Robotics and Bionics Lab.
Prof. Park, Yong-Lae
The Soft Robotics and Bionics Lab analyzes the design principles and dynamics of biological systems to develop advanced soft robotics and bionics technologies.
Utilizing flexible sensors, soft actuators, and stretchable electronics, the lab researches next-generation biomedical robotic systems that closely interact with humans, including wearable rehabilitation devices, active prosthetics and orthotics, and soft surgical tools.
By developing smart structures that implement biological sensing and actuation mechanisms, the lab aims to establish intuitive and adaptive design and manufacturing methodologies for robotic systems.
Transformative Architecture Laboratory
Prof. Yang, Jinkyu
The Transformative Architecture Laboratory explores the design and fabrication of advanced structural systems by integrating a wide range of disciplines, including mechanical engineering (mechanics, manufacturing, and robotics), as well as mathematics, physics, architecture, design, and data-driven modeling.
Their research aims to create structures that are not only mechanically and functionally optimized, but also aesthetically and architecturally expressive. By bridging engineering and design, the lab develops innovative solutions that respond to the evolving demands of the built environment.

Robust Perception for Mobile robotics Laboratory
Prof. Kim, Ayoung
The Robust Perception and Mobile Robotics Lab conducts research to enhance spatial intelligence in autonomous robots using advanced sensor-based perception technologies.
We develop perception-based SLAM, sensor fusion, decision-making, and control algorithms to enable robust operation even in GPS-denied environments such as indoors, urban areas, and underwater.
Our work also expands the applicability of robotics in industrial settings through resources like the multi-spectral dataset (TRansPose) for transparent object perception and manipulation, and the 6D pose estimation model(PrimA6D++).
MetaStructure Laboratory
Prof. Oh, Joo Hwan
The MetaStruct Lab is a multidisciplinary research group that investigates artificially engineered metastructures composed of microstructural arrays, aiming to realize unconventional mechanical properties unattainable with traditional materials. We explore novel elastic phenomena based on nonstandard behaviors such as negative mass density and negative stiffness, and apply these principles to the design of advanced mechanical systems.
Their research integrates microstructure design, multiphysics analysis, and experimental validation to drive innovation in next-generation structures and materials.
Healthcare Robotics Laboratory
Prof. Han, Amy Kyungwon
The Healthcare Robotics Laboratory develops innovative robotic systems and mechanisms for surgery, therapy, and rehabilitation. Their focus is on technologies that interact directly with patients, including surgical robots, haptic feedback devices, and implantable medical systems.
The lab design and implement key components for next-generation medical robots, such as soft artificial muscles, flexible sensors, and miniature actuators, enabling applications in precision surgery, remote healthcare, and biometric monitoring. By integrating bio-inspired mechanisms and smart materials, the lab aims to create human-friendly, efficient medical devices.

Vehicle Autonomy & Intelligence Lab
Prof. Joa, Eunhyek
Vehicle Autonomy and Intelligence Lab focuses on developing theoretical and algorithmic methods to address fundamental challenges in vehicle autonomy and the physical intelligence in vehicles and mobile robots, with the goal of enabling safer, human-centric, and energy-efficient mobility at scale.