동역학 및 제어 그룹에서는 자동차, 로봇 등 기계 시스템의 동역학적 분석과 이에 적합한 제어 알고리즘 개발을 통해 창의적이고 탁월한 성능을 가진 새로운 기계 시스템을 창출하는 연구를 수행합니다.
로봇 자동화 실험실
박종우 교수
로봇 자동화 연구실(Robotics Lab)은 로봇 시스템의 동역학 모델링, 제어, 그리고 인공지능 기반 학습 기법을 융합하여 지능형 로봇의 정밀한 조작과 자율적 행동을 연구합니다.
로봇의 파지(grasping), 조작(manipulation), 동작 계획(motion planning) 등 물리적 상호작용 기술과 함께, 머신러닝 및 수학적 데이터 과학 기반의 로봇 학습 알고리즘을 개발하여 복잡한 환경에서도 유연하게 작동하는 차세대 로봇 기술을 탐구합니다.
이를 통해 산업 자동화, 서비스 로봇, 휴머노이드 등 다양한 응용 분야에 적용 가능한 지능형 로봇 시스템 구현을 목표로 합니다.
음향 및 진동 연구실(Acoustics and Vibration Lab)은 다양한 기계 시스템의 소음 및 진동 특성을 분석하고 이를 저감하기 위한 기술을 개발합니다.
차량, 모터 등 실제 산업 환경에서 발생하는 소음·진동 문제를 해결하기 위해, Advanced Automotive Research Center(AARC)의 고성능 장비를 활용한 NVH(Noise, Vibration, Harshness) 실험 및 해석 기반 연구를 수행합니다. 실험-해석 융합 기법, 인공지능(AI) 등 최신 기술을 접목하여 기존 기법의 한계를 극복하고, 정밀하고 효율적인 저감 솔루션을 도출합니다.
또한, 음향 재료, 능동소음제어, 심리음향 등 다양한 분야로 연구를 확장하며, 실용적이고 통합적인 소음진동 제어 기술을 구현합니다.
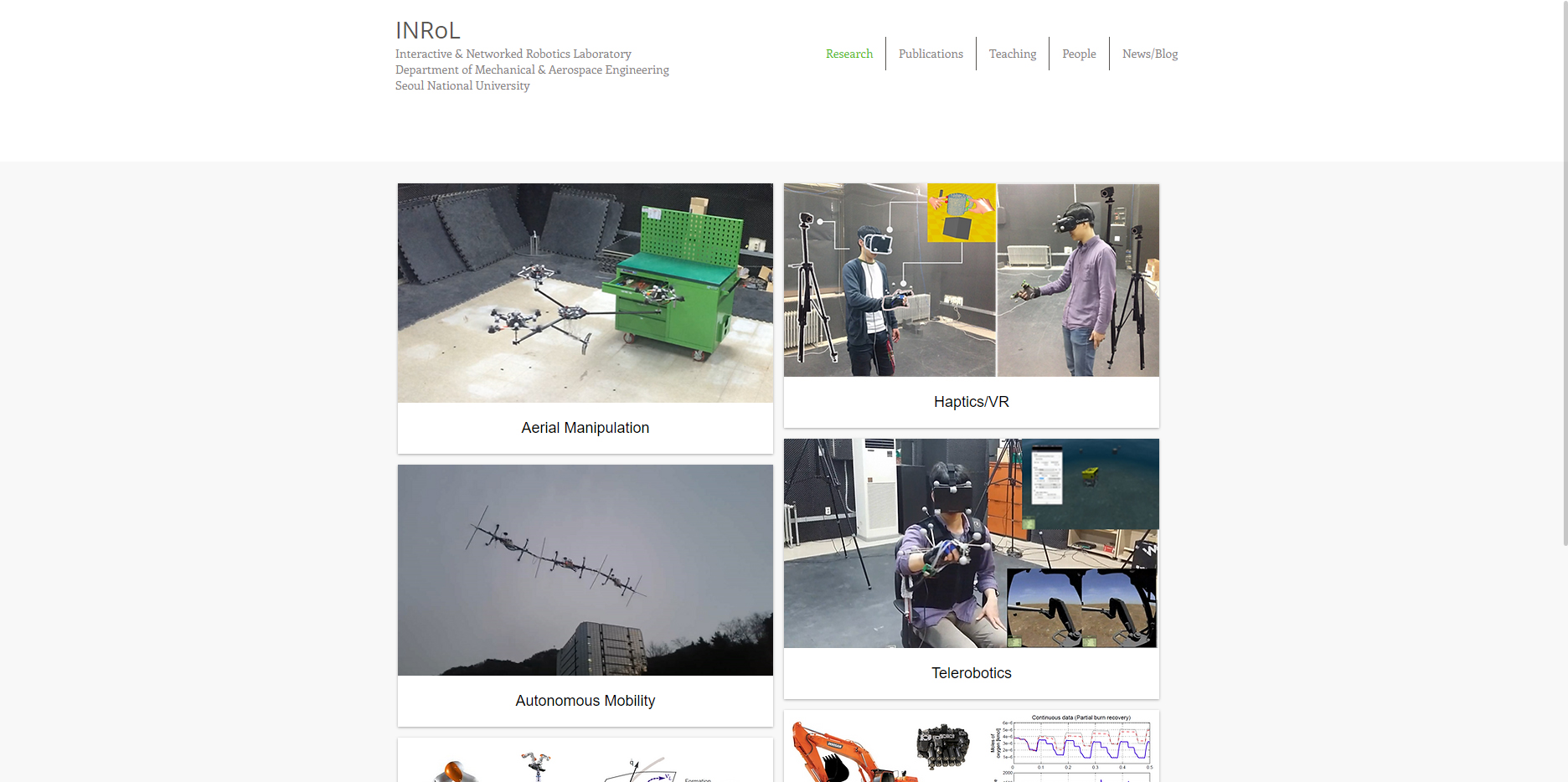
인터랙티브/네트워크 로보틱스 연구실(Interactive & Networked Robotics Lab)은 통신이나 물리적으로 연결되어 있고, 다양한 환경/물체/사람과 효율적이고 안전하게 상호작용함으로써, 산업 현장이나 우리 생활에서 실질적이고 유용한 작업을 수행할 수 있는 차세대 로봇 기술을 연구합니다.
로봇역학, 제어이론, 최적화, 시뮬레이션, 센서융합 등 다양한 이론적 토대위에서 정교하고 복잡한 로봇 조작(manipulation), 드론 및 공중작업(aerial operation) 로봇, 원격제어로봇(telerobotics), 햅틱/가상현실(haptics/VR), 자율이동(autonomous mobility) 등을 위한 핵심 이론과 알고리즘을 탐구합니다.
컴퓨터비전과 기계학습 기술을 로봇이나 드론 등 자율주행 기기에 적용할 수 있도록 3D 모델링, 물체 인식 및 추적, 실시간 3D 센싱, 센서 퓨전 등의 다양한 연구를 수행하고 있으며, 중점적으로 Visual SLAM, Large-scale 3D modeling, Visual Tracking 등의 연구를 수행하고 있다.
헬스케어 로보틱스 연구실(Healthcare Robotics Lab)은 수술, 치료, 재활 등 의료 분야의 혁신을 목표로 다양한 로봇 시스템과 메커니즘을 개발합니다.
특히 수술용 로봇, 햅틱 피드백 장치, 이식형 의료기기 등 환자와 직접 상호작용하는 기술을 중심으로 연구를 진행합니다. 연성 인공근육, 유연 센서, 소형 구동기 등 차세대 의료 로봇의 핵심 부품을 설계하고 구현하며, 이를 통해 정밀한 수술 보조, 원격 진료, 생체 신호 모니터링 등 다양한 의료 응용에 기여하고 있습니다. 또한, 생체 모사 메커니즘과 스마트 소재를 활용하여 인체 친화적이고 효율적인 의료기기를 개발하고 있습니다.